-
Correo electrónico
hengleyiqi@163.com
-
Teléfono
18340091069
-
Dirección
Distrito de shizhong, ciudad de jinan, Provincia de Shandong
Categorías de producto
- Fatiga del automóvil
- Banco de pruebas estructurales
- Sistema de prueba de carga de truss de acero
- Dispositivo de prueba de mecánica estructural multifuncional
- Sistema de marco de reacción
- Máquina de prueba de fatiga pulsante
- Sistema de carga mecánica
- Materiales similares
- Servomotor electrohidráulico
- Máquina de prueba de fatiga de torsión
Jinan hengle xingke Instrument co., Ltd.

Sistema de prueba de agarre de recuperación de cohetes - hlsyxt
NegociableActualización en11/20
- modelo
- Naturaleza del fabricante
- Productores
- Categoría de producto
- Lugar de origen
Descripción general
Sistema de prueba de agarre de recuperación de cohetes - hlsyxt $r $n $r $n dispositivo experimental de agarre de recuperación espacial - hlzz $r $n $r $n sistema de agarre de recuperación de cohetes - hengle Instrument $r $n $r $n sistema de prueba de agarre de recuperación de cohetes $r $n $r $n sistema de prueba de agarre de palillos de recuperación de cohetes
Detalles del producto
Sistema de prueba de agarre de recuperación de cohetes - hlsyxt
Dispositivo experimental de retención de recuperación espacial - hlzz
Sistema de retención de recuperación de cohetes - instrumento hengle
Sistema de prueba de retención de recuperación de cohetes
Sistema de prueba de palillos de recuperación de cohetes
Dispositivo experimental de recuperación de cohetes
Sistema de prueba de agarre de recuperación espacial
Sistema de prueba de agarre de recuperación de cohetes - hlsyxt,Como dos enormes brazos robóticos, están instalados a ambos lados del lanzador, como dos "palillos" flexibles. Cuando termina la Misión y regresa al suelo, ajusta automáticamente su postura y vuela lentamente sobre la Plataforma de lanzamiento. En el momento en que se acerca a la Plataforma de lanzamiento, el par de brazos robóticos sobresale con precisión, como palillos con albóndigas, sujetando cuidadosamente a hoojia para que caiga firmemente sobre la Plataforma de lanzamiento sin que tenga que aterrizar con dificultad por sí mismo. Este dispositivo es en realidad una "máquina de agarrar muñecas" de alta tecnología. Se basa en los siguientes principios científicos:
(1) cálculo: el brazo robótico debe calcular la velocidad, dirección y altura de vuelo de hoojian y ajustar la posición a tiempo para garantizar que los "palillos" puedan atrapar a hoojian. Es como agarrar las "garras" de la máquina de muñecas necesita apuntar a la cabeza de la muñeca.
(2) control de actitud: al aterrizar, huajian necesita ajustar su ángulo y velocidad para "deslizarse" lentamente y directamente hacia abajo. Al igual que cuando lanzas baloncesto, tienes que controlar el ángulo y la fuerza de los brazos para asegurarte de que el balón pueda entrar en la canasta.
(3) sistema de retroalimentación: tanto huojian como el brazo robótico están equipados con sensores que pueden responder rápidamente a los cambios ambientales. Una vez que hoojian se desvía ligeramente de la órbita predeterminada, el sistema lo corrige inmediatamente para asegurarse de que se acopla a los "palillos".

II. parámetros técnicos
1) accionamiento: diámetro del agujero 60 mm, diseño modular.
2) empuje nominal del aplicador: 500kn;
3) sensor de carga: sensor de carga de habló de alta precisión;
4) rango y resolución de medición de carga: 4% - 100 FS por ciento, resolución de medición de carga: 0,1 kn;
5) precisión de medición de la carga: + 1% del valor mostrado en un rango del 4% al 100%;
6) recorrido nominal de carga: 200 mm;
7) la resolución angular del sensor de inclinación es superior a 0,01 grados;
8) velocidad nominal del aplicador: 2,5 mm / s;

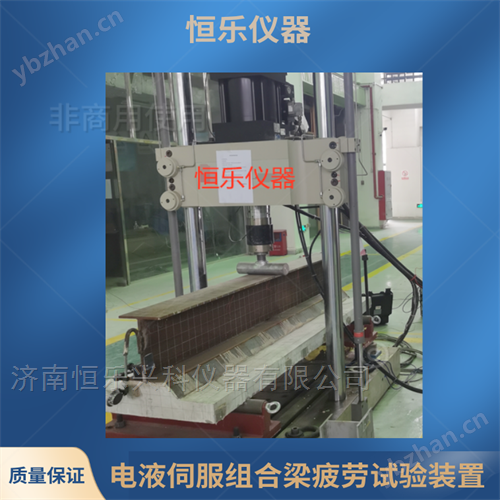
3. servomotor de carga electrohidráulico estático
1. 2000kn servomotor de carga electrohidráulica vertical, empuje: 2000kn, fuerza de tracción: 6000kn; recorrido: 600mm (+ 300mm);
2. el marco principal carga un servomotor electrohidráulico horizontalmente en un solo lado, con un empuje de 6000kn y una fuerza de tracción de 4000kn; el viaje es de ± 400mm.
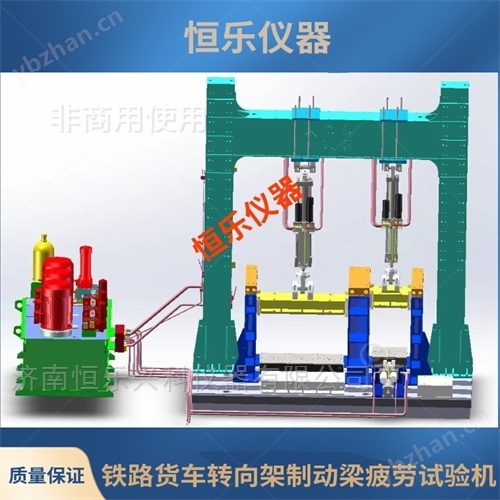
Sistema de carga de palillos de recuperación de cohetes
CoheteDispositivo de prueba de carga mecánica del brazo amortiguador de recuperación
Sistema de carga de palillos de recuperación espacial
Sistema de clip de palillos de recuperación de cohetes
IV. sistemas de control
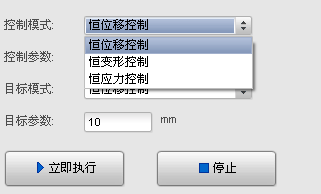
1. un conjunto de software y controlador del sistema de control de carga mecánica multifuncional. las principales funciones del software incluyen: control de esfuerzo constante, control de desplazamiento constante, control de deformación constante, que puede establecer ciertos pasos circulares. Y se puede lograr una conversión sin impacto entre varios métodos de control para lograr un control automático de circuito cerrado. El control del desplazamiento, la carga, el estrés y el tiempo de retención se puede realizar en al menos cuatro pasos.
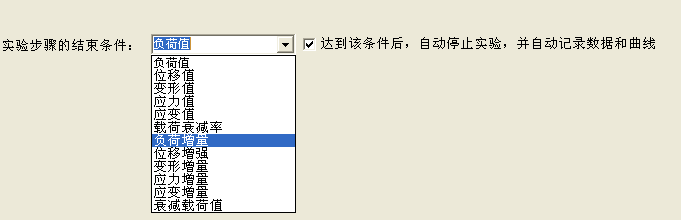
2. las condiciones de finalización de los pasos experimentales se pueden seleccionar: valor de carga, valor de desplazamiento, valor de deformación, valor de esfuerzo, valor de tensión, tasa de atenuación de carga, aumento de carga, aumento de desplazamiento, aumento de deformación, aumento de tensión, aumento de tensión, valor de carga de atenuación, etc. después de cumplir esta condición, la prueba se detiene automáticamente y Los datos y curvas se registran automáticamente,
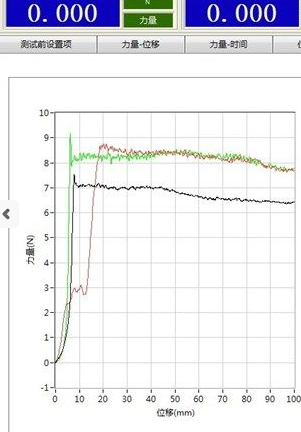
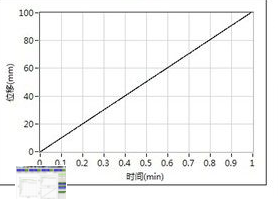
3. el software tiene la función de visualización de datos de prueba, y puede mostrar curvas de historia de tiempo en tiempo real, curvas de estancamiento, visualización numérica y animación de vibración estructural durante la prueba.
Hengle xingke se adhiere al espíritu empresarial de "calidad *", se basa en la integridad, busca el desarrollo con la innovación científica y tecnológica y proporciona a los usuarios soluciones completas de prueba experimental con entusiasmo.
¡Misión de hengle xingke: "¡ perseguir y revitalizar la Ciencia y la tecnología" y trabajar constantemente para revitalizar la industria nacional!
Producto similar Recomendar